I obtained my bachelor's degree from UC Berkeley, double majoring in Data Science (Robotics Emphasis) and Mathematics, with minors in Japanese Literature and EECS.
At UC Berkeley I was fortunate enough to work with Prof. Alice Agogino at her BEST Lab and Squishy Robotics.
At the broadest level, my research lies at the intersection of robotics, computer vision, and machine learning.
I am particularly interested in contact-rich manipulation: can we make robots as dexterous, adaptive, and efficient as humans when interacting with objects, the environment, or even other people through contact?
I would like to approach this problem with a diverse toolbox, including deep learning, tactile sensing, model predictive control, vision-language models, hardware design, simulation, and even emerging approaches like neuromorphic computing.
In my free time, I also contribute my computational skills to scientific research in other fields such as anthropology.
Thank you for your interest in collaborating! Please don't hesitate to shoot me an email.
For Undergrad/MS students, please additionally send me a link to a Github repo that you feel proudest of. I am especially impressed by students with the habit of writing clean, well-documented code. You can also consider filling out our lab's recruiting form so more PhD students can get to know you.
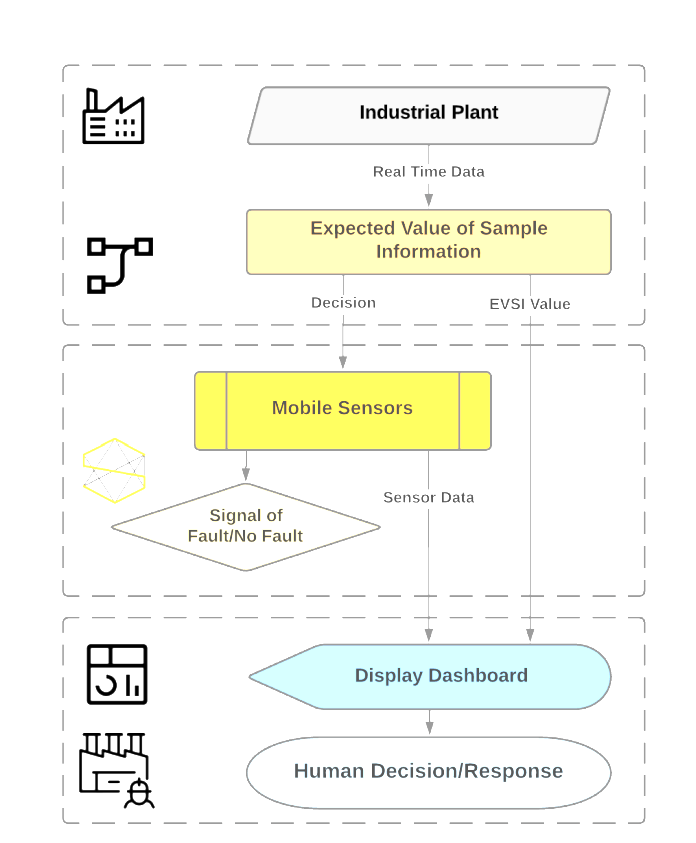
A framework for optimizing the deployment of emergency sensors using Long Short-Term Memory (LSTM) Neural Network and Expected Value of Information (EVI)
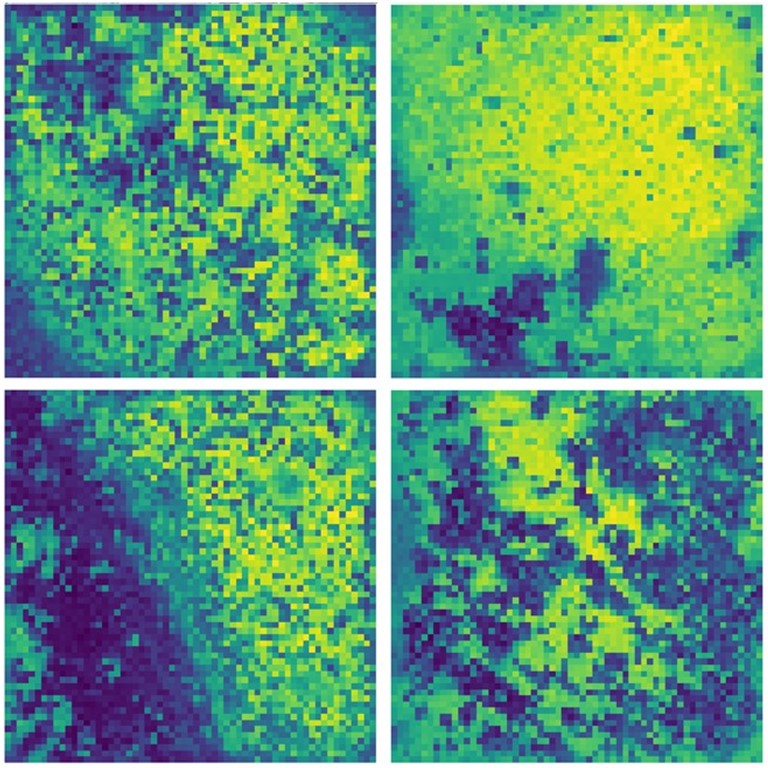
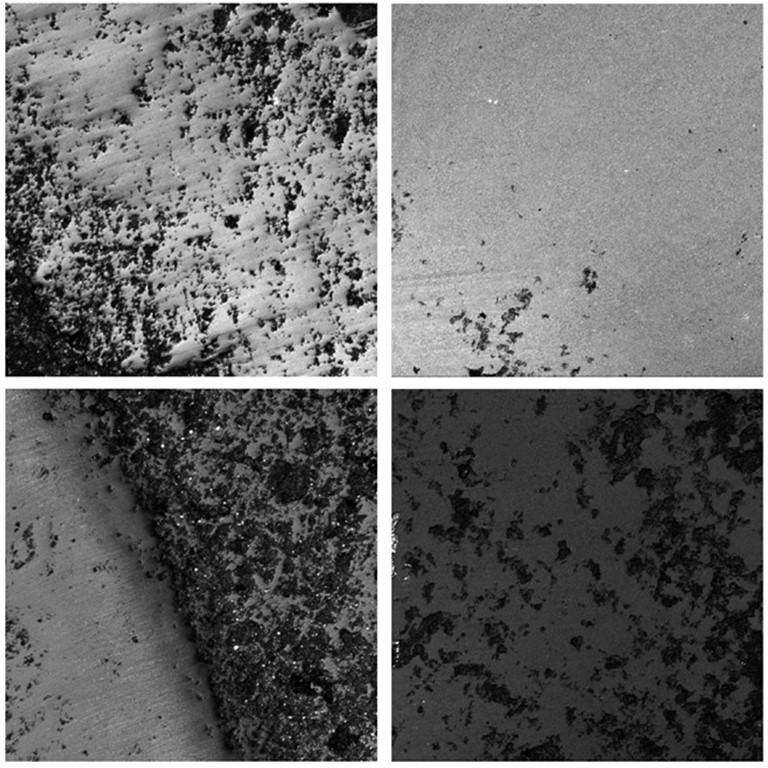
Paleoanthropology meets cutting-edge computer vision! We create the first Lithic Use-Wear Analysis (LUWA) dataset and challenge Large Vision Model and Large Language and Vision Model with it.
Personal Projects
Please visit this repo. It contains pointers to some personal projects ranging from robotics to a RISC-V CPU implemented on a Xilinx FPGA board.
Teaching
Teaching Aide, ROB-UY 3203 Robot Vision, Spring 2022, 2023, 2025
Teaching Aide, ROB-GY 6203 Robot Perception, Fall 2022, 2023, 2025